福島第一原発の廃炉作業、燃料デブリ取り出しは?(現状と課題)福島第一原発の廃炉、燃料デブリ取り出しに向けた技術開発と課題
福島第一原発の廃炉に向け、燃料デブリ取り出し技術の開発が急務!巨大ロボットアームや新会社「Decom.Tech」設立など、様々な取り組みがされています。しかし、技術的な課題や計画変更も。2030年代の大規模取り出しに向け、安全かつ着実な廃炉完了を目指します。
💡 福島第一原発の廃炉作業は、燃料デブリ取り出しが最難関。
💡 様々な技術開発が進むも、ロボットアームなどの実用化には課題。
💡 新たな体制として、東双みらいテクノロジー株式会社が設立。
それでは、燃料デブリ取り出しに向けた廃炉作業の現状と課題について、Chapter-1から詳しく見ていきましょう。
廃炉への道:2011年の事故から現在まで
福島の廃炉で最難関は?燃料デブリ取り出し、どうする?
燃料デブリの取り出し。技術開発が急務。
2011年の事故から10年以上が経過し、廃炉作業は長期化していますね。
公開日:2023/10/27
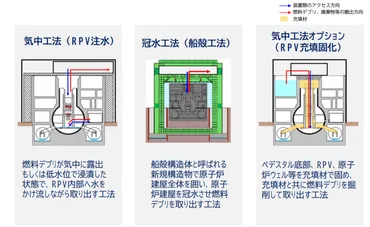
✅ 原子力損害賠償・廃炉等支援機構(NDF)は、福島第一原発3号機の燃料デブリ取り出しに向け、気中工法、冠水工法に加え、新たに充填固化工法を提案。
✅ 充填固化工法は、燃料デブリを充填材で固めて安定化させ、構造物や充填材ごと回収する手法で、被ばく抑制に優れる一方、廃棄物の増加が懸念される。
✅ 燃料デブリ取り出しは、2号機で2023年度後半に試験的な取り出しに着手予定であり、格納容器への貫通孔の開放作業が完了したが、入り口付近は堆積物で覆われていることが確認された。
さらに読む ⇒一般社団法人日本原子力産業協会出典/画像元: https://www.jaif.or.jp/journal/japan/20236.html燃料デブリ取り出しは、技術的にも非常に困難な作業であることが分かります。
2011年の東京電力福島第一原子力発電所の事故後、政府と東京電力は「中長期ロードマップ」を策定し、廃炉作業を進めてきました。
燃料デブリの取り出しは、最も困難な課題の一つであり、技術開発や計画策定が急務です。
高濃度の放射線、複雑な炉内状況、そして世界初の燃料デブリ取り出しという課題に直面し、技術開発と計画の策定が急がれています。
う~ん、やっぱりお金がかかりますね!でも、デブリを取り出せれば、その後の復興も加速するでしょう。投資の価値ありですよ!
デブリ取り出しに向けた技術開発:ロボットアーム
デブリ取り出し、最新ロボの実力は?
カメラやアームで障害物を回避し作業!
様々なロボット技術が開発されているんですね。
公開日:2019/05/10

✅ 三菱重工とIRIDは、福島第一原発の燃料デブリ回収用ロボットアームとアクセスレールの試作機を公開し、連動試験を実施した。
✅ ロボットアームは格納容器深部まで届くように約7メートルの長さがあり、カッター型やトング型など数種類のツールを交換しながら燃料デブリを回収し、1日約300キログラムの回収を目標としている。
✅ 2021年からの本格回収に向けて、実用機の開発を進めており、装置の動作精度向上やカメラなどの最適化を検討している。
さらに読む ⇒電気新聞ウェブサイト日本電気協会新聞部が発行する電気新聞のホームページ。電力・エネルギーを中心に電機、通信、電設、建設・工事の最新ニュースを提供。電力業界の人事情報も充実。出典/画像元: https://www.denkishimbun.com/sp/40244ロボットアームは、格納容器内の作業を担う重要な技術ですね。
実用化に期待したいです。
燃料デブリの取り出しに向け、様々なロボット技術が開発されています。
最も注目されているのは、三菱重工業と英国企業が共同開発した全長約22mのロボットアームです。
このアームは、格納容器内の燃料デブリへアクセスするために、ケーブルなどの障害物を避けながら、カメラセンサー、レーザースキャナーセンサー、双腕マニピュレータを駆使して作業を行います。
また、日立グループも、重作業に対応する双腕重機ロボット「ASTACO-SoRa」や、高放射線環境下での燃料デブリ取り出し作業に適した柔構造アーム「筋肉ロボット」などの作業用ロボットを開発しています。
すごいね!でも、こんな複雑な作業、遠隔操作だけでできるもんなのかな?ちゃんと安全に作業できるかが大事だよね。
ロボットアームの現状と課題
三菱重工ロボ、デブリ取り出しはなぜ延期?
性能不足や準備難航が原因です。
ロボットアームの開発は、順調に進んでいるように見えますが、課題も多いようですね。

✅ 福島第一原発の廃炉作業において、最難関とされる燃料デブリの試験的取り出しが、2号機で2022年に開始予定。
✅ 三菱重工業が開発中のロボットアームは、格納容器の狭い貫通部を通るために細く設計され、22mまで伸びてデブリを回収する。JAEA楢葉遠隔技術開発センターで実寸大模型を用いた検証が行われている。
✅ ロボットアームは、双腕マニピュレータで様々なツールを付け替えて使用し、カメラやレーザースキャナーからの情報とVR技術を用いて遠隔操作される。
さらに読む ⇒エネルギー視点で未来を考えるメディアページ出典/画像元: https://emira-t.jp/topics/21129/実寸大模型での検証が行われているのは、重要な取り組みですね。
課題を一つずつクリアしていくことが重要です。
三菱重工業が開発したロボットアームは、福島県楢葉町のJAEA楢葉遠隔技術開発センターで実寸大模型による検証が行われていますが、性能不足や準備作業の難航により、当初予定されていた試験的デブリ取り出し作業は延期されました。
遠距離へのアームの展開、格納容器内の詳細調査、放射性物質漏洩対策は、技術的な課題として挙げられています。
東電は、このロボットアームに加え、釣りざお状の装置の使用も検討しており、計画変更の可能性も示唆しています。
うーん、なんか大変そう。でも、頑張ってほしいわね。私にはよくわからないけど。
新たな体制:東双みらいテクノロジー株式会社の設立
燃料デブリ取り出し新会社、何を目指す?
2030年代の大規模取り出し実現!
安全に作業を進めることが、最優先事項ですね。
新会社の設立は、燃料デブリ取り出しに向けた大きな一歩ですね。
着実な進展を期待します。
東京電力ホールディングス株式会社と株式会社IHIは、燃料デブリ取り出しに向けた共同事業体として「東双みらいテクノロジー株式会社(Decom.Tech)」を設立しました。
この新会社は、燃料デブリの大規模取り出しに必要なシステム・設備の基本設計と研究開発を担い、2030年代に計画されている大規模取り出しに向け、段階的に事業を拡大していきます。
両社は、エンジニアリングと研究開発の一体管理、プロジェクトリスク管理の強化を通じて、安全かつ着実に燃料デブリ取り出しを遂行し、長期的な廃炉の完了を目指します。
お、これは面白そう!企業同士の連携で、どんな革新的な技術が出てくるのか楽しみだね!
今後の展望:技術的進展と計画の行方
燃料デブリ取り出し、78億円のロボアームはどうなる?
使用保留、釣りざお状の装置も検討
計画が延期になるのは残念ですが、安全第一で進めてほしいですね。
公開日:2023/11/16

✅ 福島第一原発2号機で燃料デブリを取り出す計画が、貫通部の堆積物で妨げられ、3回目の延期になる可能性が高まっている。
✅ 東京電力は、2号機の原子炉の下につながる貫通部のふたを開けたところ、内部が灰色の堆積物で埋め尽くされていた。
✅ 東電は、折りたたみ式のロボットアームを用いて、貫通部から少量の燃料デブリを回収する計画である。
さらに読む ⇒ニュースサイト出典/画像元: https://mainichi.jp/articles/20231115/k00/00m/040/155000c技術開発の進展と、次世代ロボット技術の開発に期待したいですね。
福島第一原発2号機からの燃料デブリ取り出し試験は、当初予定されていた3月から10月へと延期され、ロボットアームの代わりに釣りざお状の装置を使用する方法に切り替える可能性も出てきました。
ロボットアームには約78億円の国費が投じられましたが、その使用は保留されています。
今後は、Decom.Techによる技術開発の進展が期待されるとともに、廃炉作業は、高放射線環境下での作業効率化と安全性の向上を目指し、調査・監視向けのドローンなど、次世代ロボット技術の開発も進められています。
三菱重工の関係者は、難易度の高いプロジェクトだが、着実に進めたいと意気込んでいます。
うーん、延期かぁ。でも、安全にデブリを取り出すことが一番大事だよね。技術開発、頑張ってほしいな。
本日は、福島第一原発の廃炉作業、燃料デブリ取り出しの現状と課題についてご紹介いたしました。
今後の進展に期待したいですね。
💡 福島第一原発の廃炉作業は、長期的な取り組み。
💡 燃料デブリ取り出しに向け、技術開発と体制強化が進む。
💡 今後の技術的進展と計画の行方が注目される。